- Joined
- Aug 23, 2020
- Messages
- 3,816
- Reaction score
- 4,643
- Location
- Paradise Valley, AZ
- Cars
- Lucid GT
- Referral Code
- K9WIJHB0
I see a lot of criticism of Lucid’s Dream Drive ADAS system. Some of which is well deserved, some if which also shows an incomplete understanding of how ADAS systems work. The biggest criticism seems to be reaction, or lack of reaction, to stopped cars. Lucid does seem worse than other systems, but almost every system includes a warning about stopped objects. Below is some background on fundamental ADAS components, their limitations and fusion of sensor data. I have NOT included ultrasonic and parking assist functions. I am also ignoring vision only systems (Tesla) because I have not spent any time researching that system. All sensors have advantages and limitations. Hence, multi-sensor systems are most common.
Below is a generic picture of different ADAS sensors. The number of radar, LiDAR and camera sensors can be different from different automakers. The overall view is common.

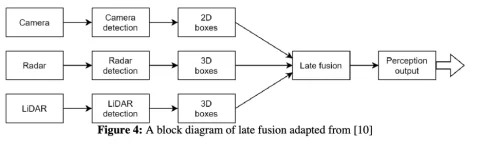
Due to limitations of posts on the forum, I will break this post into multiple sections. One on sensors and one on sensor fusion along with a summary.
Below is a generic picture of different ADAS sensors. The number of radar, LiDAR and camera sensors can be different from different automakers. The overall view is common.
Due to limitations of posts on the forum, I will break this post into multiple sections. One on sensors and one on sensor fusion along with a summary.